在已经足够轻薄的超极本标准之上,雅典娜计划还要追求更强大的生产力超极本在过去八年已经做到了非常好的、极致性的超薄设计,所以在雅典娜计划中,英特尔会继续这样的超薄追求。但是雅典娜计划追求的不仅仅是超薄,在这之上会附加更多的生产力,更好的图形性能以及人工智能。也就是说在极致超薄的情况下我们会赋予更多的东西。同时还有很多的领域可以去挑战,比如可以在轻薄的基础上做到更极致的窄边框的设计,同时也在花大量的精力考虑如何实现这样的双屏幕笔记本。英特尔也会把以往的一些现有笔记本上不具备的P+F传感器融入到系统,这都需要工程师花很大的力量和时间去实现这些功能。

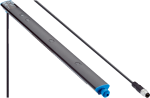
(P+F 反射板型传感器 GLK18-55-S/59/161/166)
高效系列安装在短 M18 塑料外壳内,适合标准应用,检测范围极远,4 个 LED 指示灯,360° 可见性,侧视型,用途广泛,允许采用多种供电方式
有效检测距离 : 0 ... 3,5 m 反射板的距离 : 0,05 ... 3,5 m 检测范围极限值 : 4,5 m 参考目标 : 反射板 C110-2 光源 : LED 光源类型 : 调制可见红光 , 640 nm 偏振滤波片 : 是 光点直径 : 大约 160 mm 当 4,5 m 发散角 : 大约 2 ° 光学端面 : 侧面 环境光限制 : 30000 Lux 提供的附件 : 辅助安装件 工作指示灯 : 绿色 LED,常亮 通电 功能指示灯 : 黄色 LED: 接收到光束时亮起 ; 稳定性控制不足时闪烁; 光束中断时关闭 工作电压 : 20 ... 250 V AC/DC 空载电流 : < 2,5 mA 开关类型 : 暗时接通 信号输出 : N 通道 MOSFET,带短路保护 开关电压 : 最大 250 V AC/DC 开关电流 : 最大 200 mA 电压降 : ≤ 3,5 V AC/DC 开关频率 : 50 Hz 响应时间 : ≤ 10 ms 产品标准 : EN 60947-5-2 符合标准 : EAC 符合性 : TR CU 020/2011
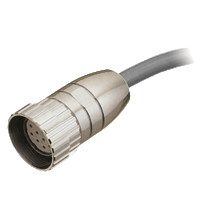
TR CU 004/2011 防护等级 : II, 当污染等级为 1-2 级(符合 IEC 60664-1 标准)时,额定绝缘电压 ≤ 250 V AC UL 认证 : cULus 认证,1 类机壳 CCC 认证 : 通过中国强制性产品认证 (CCC) 环境温度 : -20 ... 60 °C (-4 ... 140 °F) 存储温度 : -40 ... 70 °C (-40 ... 158 °F) 防护等级 : IP67 连接 : 微型 AC 连接器,1/2 V124 ; 4 针 材料 : 质量 : 大约 10 g
根据相关资料显示,华为扎根法国已有16年,目前已在法国设立芯片、数学、家庭终端以及美学等四个研发中心,2013年华为在法国宣布了一项15亿欧元的投资计划。去年11月底,华为宣布将在法国东南部城市格勒诺布尔设立第五家研发中心,主攻和田地区传感器和软件研发。
多智能体协同高精地图构建关键技术研究陈龙1, 刘坤华1, 周宝定2,3, 李清泉4,51. 中山大学计算机学院, 广东 广州 510006;2. 深圳大学土木与交通工程学院, 广东 深圳 518060;3. 深圳大学城市智慧交通与安全运维研究院, 广东 深圳 518060;4. 深圳大学广东省城市空间信息工程重点实验室, 广东 深圳 518060;5. 自然资源部大湾区地理环境监测重点实验室, 广东 深圳 518060基金项目:国家重点研发计划(2018YFB1305002);广东省自然科学杰出青年基金(2021B1515020020);国家自然科学基金(62006256;42171427);广州市重点研发项目(202007050002)摘要:自动驾驶车辆的自动化驾驶程度越高,对高精地图的要求越高。智能化的高精地图能够为L5级别自动驾驶车辆提供所需地图数据,是未来高精地图发展的重要方向。基于目前高精地图的构建方法,本文首先提出多智能体协同高精地图构建的定义,分析其构建框架。然后,对多智能体数据采集路径规划、多源异构一体化数据融合与表达、道路场景认知、智能高精地图融合、智能高精地图更新等关键技术进行了研究,提出了可行的技术方案。最后,分析了其未来构建过程中存在的挑战。关键词:高精地图 路径规划 道路场景理解 多源异构数据处理 引文格式:陈龙, 刘坤华, 周宝定, 等. 多智能体协同高精地图构建关键技术研究[J]. 测绘学报,2021,50(11):1447-1456. DOI: 10.11947/j.AGCS.2021.20210259CHEN Long, LIU Kunhua, ZHOU Baoding, et al. Key technologies of multi-agent collaborative high definition map construction[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1447-1456. DOI: 10.11947/j.AGCS.2021.20210259 阅读全文:http://xb.sinomaps.com/article/2021/1001-1595/2021-11-1447.htm引 言高精地图专为自动驾驶设计,是自动驾驶核心技术之一。它又被称为高分辨率地图,具有高精度的道路场景(车道线、交通标志、路沿等)、定位等信息,可以辅助自动驾驶过程中的感知、定位、路径规划、决策与控制,提高驾驶过程中的安全性。近年来,针对高精地图的研究可以分为以下3个研究方向:高精地图格式[1-2]、高精地图数据结构和高精地图制作方法。由于本文主要讨论高精地图的数据结构和制作方法,因此,对高精地图格式不做详细介绍。从高精地图数据逻辑方面分析,文献[3]对高精地图的静态图层数据逻辑结构进行了分析,认为高精地图应该包括:道路层、车道网络层、车道线层与交通标志层。文献[4]提出了路径导航车道级地图体系结构。由于静态地图不能保证行驶的安全,文献[5]提出局部动态地图的概念,首次将动态物的感知纳入地图范畴。文献[6]提出不同驾驶级别的自动驾驶汽车需要依赖不同级别的高精地图;自动驾驶级别越高,对高精度地图的要求越高;指出L5级别自动驾驶汽车的需求为智能化的高精地图,即动态高精地图+分析数据的能力。从高精地图制作方法分析,目前的高精地图制作均面向L3或L4级别的自动驾驶,未对L5级别的自动驾驶地图进行研究。面向L3或L4级别自动驾驶高精地图的构建可以分为数据采集、制图与地图更新3个步骤。其中,数据采集方案[7]均为通过搭配多种资料传感器的自动驾驶车辆或全景移动测量系统进行数据采集。但是无论自动驾驶数据采集车辆还是全景移动测量系统,成本均太过昂贵,不能实现大规模的数据采集,影响高精地图的制图和地图更新;同时,目前制图算法多基于深度学习来实现图像理解、定位等,该类算法存在数据需求量大、可解释性差等问题。本文以智能化的高精地图为研究对象,提出多智能体协同高精地图构建定义与框架,并对其关键技术、构建过程中存在的挑战进行了分析,该框架的核心思想包括以下两点。(1) 将数据采集平台由自动驾驶车辆或全景移动测量系统扩展为机器人、自动驾驶车辆、无人机等多种类型的智能体。通过搭配相同或者不同类型传感器的、不同类型的多个智能体协同采集数据,既降低了采集设备的成本,又保证了数据采集速度。(2) 为保证高精地图的智能性、精度和地图更新速度,提出多智能协同高精地图的制作和更新框架。本文的主要内容包括:①提出了多智能体协同高精地图构建定义和框架;②分析了多智能体协同高精地图构建过程中的关键技术;③研究了其构建过程中存在的挑战。1 多智能体协同高精地图构建定义及框架多智能体协同高精地图构建指采用多个搭建相同或不同传感器(摄像机、激光雷达、GNSS、IMU等)、不同类型的智能体(自动驾驶车辆、机器人、无人机等)协同采集数据,并对数据进行处理,实现智能高精地图制作和更新的过程。依据多智能体协同高精地图构建定义,其具体构建框架如图 1所示。图 1 多智能体协同高精地图构建Fig. 1 Multi-agent collaborative high definition map construction图选项 (1) 多智能体数据采集:通过对多智能体进行路径规划,使其协同进行数据采集的过程。其中,如何令多智能体协同工作、规划多智能体数据采集路径,实现高效、高质量采集某区域的数据是该部分的重点和难点。(2) 数据一体化表达:由于不同的传感器具有不同的数据表达形式(数据内容、格式、特性、精度等),为方便智能高精地图的制作,需要对多源异构数据进行一体化表达,得到三维地图。(3) 场景认知:智能化的高精地图具有理解静态物、半静态物、半动态物和动态物的能力,还具有解释数据(认知)的能力。而目前基于深度学习的场景感知方法要求大量训练数据,且模型泛化能力差、不具有可解释性。因此,智能化的高精地图构建需要发展对数据量要求小、模型泛化能力强、具有可解释性的场景认知方法。(4) 轨迹规划:轨迹规划用于表达虚拟道路和道路间的逻辑关系,并对自动驾驶车辆在各车道的可行驶轨迹进行规划,为自动驾驶车辆行驶过程中的导航提供强约束。(5) 地图融合:基于认知数据和轨迹数据将不同空间、时间、层次的数据高精度地融合成为一个完整的高精地图。(6) 矢量化表达:将形成的智能高精地图从俯视图角度进行矢量化表达,形成矢量地图,提供给自动驾驶车辆使用。(7) 地图更新:自动驾驶程度越高,对高精度地图的准确度要求越高。而由于现实生活中频繁的道路建设和维修,使地图不能保持现势性,进而不能为自动驾驶车辆提供准确信息。因此,智能化的高精地图需要具有较好的更新能力。2 多智能体协同高精地图构建关键技术2.1 多智能体数据采集路径规划多智能体数据采集路径规划,即多个单智能体信息交互,在共同完成某个区域数据采集的过程中,每个智能体的路径规划;其本质为多智能体路径规划。针对多智能体路径规划问题,传统的方法一般采用遗传算法[8]和蚁群算法[9]求解。然而,随着问题规模的增大、计算复杂度增加,传统方法不能高效地规划多智能体路径。近年来,随着深度学习的发展,涌现出众多基于深度强化学习的路径规划方法[10],提高了规划的效率[11-12]。但是,现有的算法在进行多智能体路径规划时,通常将问题抽象为多旅行商问题[13-14],多旅行商问题不考虑场景的复杂性与动态性。而在多智能体数据采集时,场景的复杂性与动态性是影响数据采集效率和通信效率的重要因素之一,不可以被忽略。为解决此问题,本文建立适用于多智能体协同建图的路径规划模型。集中学习和分散执行是一种多智能体协同策略。集中学习指通过应用集中的方法训练一组智能体,从而减轻智能体间通信负担。分散执行指智能体可以在其局部观测优势的基础上分散执行[15],这种体系在通信受限的情况对于保持多智能体间的信息高效交互意义重大[16]。文献[17]基于集中学习分散执行框架,提出了一种集中式专家监督多智能体强化学习算法,该算法采用DAgger算法获得单智能体分散执行策略,可以在较低的样本复杂度下训练分散执行多智能体策略。文献[18]将集中和分散的思想应用到主从多智能体架构中,主智能体处理来自从智能体的信息;从智能体接受主智能体消息,并结合自身信息来执行动作,显著降低了多智能体系统的通信负担。实际上,集中学习分散执行策略已成为多智能体系统协同的标准框架[19]。为了实现多智能体间信息交互与协同路径规划,本文提出采用“集中学习和分散执行”结合“多智能体强化学习”的多智能体协同路径规划模型,如图 2所示,以集中式深度学习模型学习多智能体全局路径规划,以分散式执行实现多智能体间高效信息交互,充分利用二者在信息处理与信息交互方面的优势。即:首先,基于深度强化学习算法分析单一智能体的观测和行为,学习建图环境状态更新信息;其次,通过深度神经网络,集中学习智能体之间的沟通和协同方法;最后,基于网络结构,实现智能体之间的交互及协同规划,从而完成基于集中学习分散处理的多智能体路径规划方案。图 2 集中学习分散执行路径规划模型Fig. 2 Path planning model with centralized learning and decentralized execution图选项 具体来讲,各智能体向集中式学习模型发送建图环境状态更新信息,如场景随时间动态变化、与预测复杂度差异较大等;集中式学习模型将全部更新信息集中表达为图神经网络的形式,并基于该网络同步更新全局实时地图特征。更新后的全局特征发送至所有智能体,为多智能体路径规划提供一个新的全局视野。多智能体接收来自集中学习模型提取的全局地图特征,结合局部观测信息进行分布式规划得到新的执行策略。
奇瑙科技是一家情感计算领域科创企业,成立于2018年8月,南京建邺区高层次创业人才引进计划项目,国家高新技术企业。奇瑙科技是中国领先的传播领域情绪智能分析专家,其拥有自主开发的创新型情感信号传感分析系统——达芬奇智能心智分析系统。公司深耕智能可穿戴行业中皮电传感细分市场,通过手带式可穿戴皮电P+F传感器、自有软件分析系统和心理学分析技术的结合,最终实现对人体情感的分析解读。目前,奇瑙科技占据了智能可穿戴行业皮电传感领域中约80%的市场份额。
格科微一直采用无晶圆厂模式,为了提升研发迭代速度、保护自主工艺能力以及保障产能安全,公司将“12英寸CIS集成电路特色工艺研发与产业化项目”作为IPO募投项目,旨在向轻晶圆厂模式转变,也就是说经营模式由Fabless转为Fab-lite。转变之后,公司部分BSI图像和田地区传感器产品的生产将从直接采购BSI晶圆转变为先采购标准CIS逻辑电路晶圆,再自主进行晶圆键合、晶圆减薄等BSI晶圆特殊加工工序。该项目计划使用资金35.08亿元,实施地点位于上海市临港产业区,新增产能主要用于生产1300万像素及以上的中高阶CIS产品,该项目于2021年8月完成主体厂房封顶,临港工厂最早或在2023年达产。
IMERG是全球降水计划GPM推出的新一代多卫星融合反演降水的产品,它充分利用GPM平台上主被动微波资料传感器和各类红外数据传感器提供的数据以及融合TRMM(Tropical Rainfall Measuring Mission)时代的卫星降水反演算法。目前IMERG提供三种类型的卫星降水数据,分别是Early Run、Late Run和Final Run, 三种类型的卫星降水数据的时空分辨率为0.1°/30 min。Final Run产品经过了全球雨量站点进行校正,就精度而言要比Early Run和Late Run产品高,但Final Run产品的数据要延时约3.5个月才会发布。Early Run和Late Run均为准实时产品,Early Run和 Late Run 的延迟时间短,分别延时4 h和12 h发布,Early 只使用前向传播(基本上相当于外推)算法,而 Late 采用了前向和反向传播(允许插值)两种算法。
一周总结经“中心” 监测:江铃汽车股份有限公司根据《缺陷汽车产品召回管理条例》和《缺陷汽车产品召回管理条例实施办法》的要求,向国家市场监督管理总局备案了召回计划,将自2018年5月5日起,召回2015年8月1日至2016年7月31日期间生产的部分江铃福特新世代全顺汽车,共计7180辆。江铃汽车股份有限公司将为召回范围内的车辆免费检查并更换曲轴位置传感器,消除安全隐患。
用于食品温度计、工业探头和传感器的热电偶食品温度计通常会采用热电偶技术,以在食品配料和全餐的制造和准备阶段快速提供准确的温度读数。与传统的餐饮温度计不同,热电偶在烹饪时无需留在食物中。例如数字食品温度计的热电偶具有快速的响应时间,这意味着它可以在较大物品(如肉类和家禽)的多个位置快速准确地测量温度,且无需等待温度计记录各个位置的正确热量读数。此外,该技术还可以用于非常小的精确导线连接件,即使是无法承受标准食品温度计的非常轻薄精致的物品,它也能获得准确读数。相同的原理适用于众多制造领域的各种工业级传感器和探针,也适用于对温度有严格要求的生产过程。许多计划用于工厂、机械或实验室应用的热电偶还具有磁探针以及坚固的热传感器,即使用于更苛刻的环境(比家用更加苛刻),也能表现良好。
传感器使虚拟安全幕或气泡能够将机器人操作与非计划的人类交互分开,同时避免机器人与机器人发生由于密度和操作可编程性增加而导致的碰撞。基于视觉的安全系统需要受控制的照明,这会增加能耗、产生热量且需要维护。在尘土飞扬的制造环境(如纺织或地毯编织)中,需要经常清洁和注意透镜。
商场如战场,战场却并不太平。安森美宣布扩产能,其专注于智能汽车与工业方向的图像传感器,ST也扩大了图像传感器的行动计划。战场新星如SK海力士,斯特威则努力挤进这个大盘子当中。或许,群雄逐鹿的时代,就此来临。